The Tertill: an autonomous weeder from Franklin Robotics

Franklin Robotics’ Tertill is an autonomous weeding robot designed to control agricultural weeds through the use of a built-in weed whacker. With two conductivity sensors, one around its side and another on its underside, the Tertill is able to sense walls and tell the difference between large and small plants. All farmers need to do is place their Tertill into their field when the crop is tall enough to hit the side sensors. When weeds come into contact with the sensor underneath it, the weed whacker is turned on. MS student Johnny Sanchez has been investigating the efficacy of the Tertill among various weeds and soil conditions.
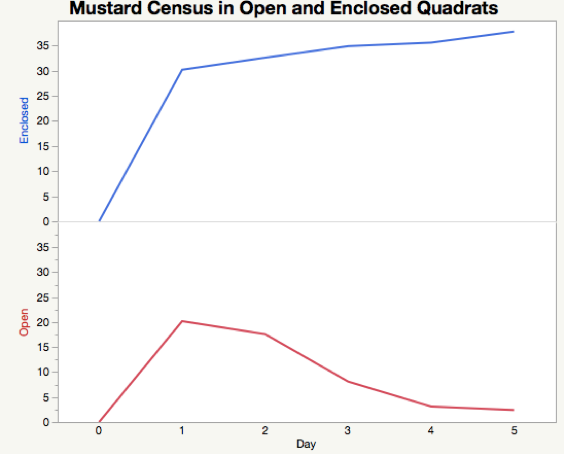
In an initial experiment, Johnny tested the effect of the Tertill on weed density by enclosing areas to protect weeds from the robot, and comparing them to open areas where weeds were susceptible. He found that the Tertill did indeed reduce weed density, as shown in Fig. 1.
During preliminary tests, it became apparent that the wheels of the Tertill, which are designed to effectively cross difficult terrain, also have a weed-killing ability. He and high school EPSCoR student, Atticus Scott, have been investigating this serendipitous ability.
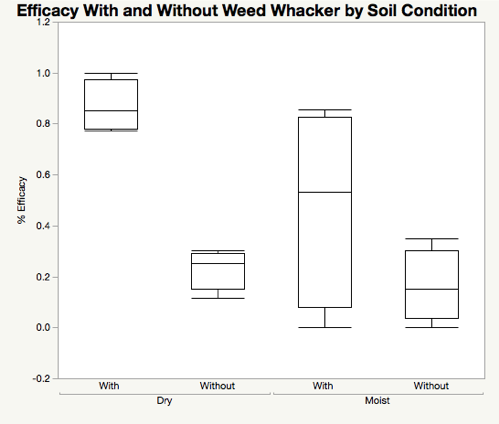
As shown in Fig. 2, the Tertill has been up to 40% effective at killing weeds even without the weed whacker, when the wheels are the only weed-killing mechanisms. This experiment also showed how effective the Tertill can be overall, especially in dry soil conditions.
Johnny and Atticus have also been investigating the efficacy of this robotic weeder in grass weeds, as well as the relationship between spatial and temporal aspects of the environment and its efficacy. In the meantime, Franklin Robotics is investigating ways to make the wheels of the Tertill even more effective.