Team #3 Mars Rover
Meet the Team
Ben DiSalvatore

Hello, my name is Ben DiSalvatore, I am a student at the University of Maine majoring in Mechanical Engineering Technology and minoring in Electrical Engineering Technology. I grew up in Hampden Maine and graduated from Hampden Academy. I am very excited about this project because I went to the Challenger Learning Center back in elementary school and I had a very positive experience there. The experience I had at the Challenger Learning Center added to my fascination with space and pushed me towards pursuing a STEM-related program for my undergrad.
Peter Berube

Peter Berube is a senior from Andover Massachusetts. Peter is a Mechanical engineering technology major as well as a member of the University of Maine Honors College. Outside of classes Peter enjoys spending time with his friends, attending UMaine hockey games, and volunteering in his community. Peter is a member of the Umaine 3D printing club where serves as the Treasurer of the University of Maine 3D Printing Club as well as a lab technician helping to run the 3D printing lab. After Graduation, Peter plans to enter the workforce, focusing on a career in project engineering for marine and movable infrastructure projects in the United States later returning to obtain his master’s in business administration. Peter is excited to work on this project because his early STEM experiences helped motivate him to become an engineer and believes that young students should be exposed to hands-on experiences early which is one of the missions of our Clients.
Lucas Decelles

Lucas Decelles is a senior at the University of Maine majoring in mechanical engineering technology. Originally from West Hartford, Connecticut, he came up to Maine to pursue an engineering education and doesn’t plan on leaving anytime soon. Lucas is currently employed by and hopes to continue his career at Old Town Canoe after graduation. He believes that STEM education is extremely important and is excited to bring an interactive approach to STEM for students and campers at the Challenger Learning Center in Bangor, Maine.
Nick Kamara

Nick Kamara was born in Würzburg, Germany to a military family. He has lived in several places including Washington State, Germany, and Massachusetts. In his free time, he enjoys snowboarding, playing sports, and is an avid car enthusiast. Nick is excited to work on the project because he is very interested in space explorations and the potential of space travel.
Project Overview
The interactive Mars Rover project was given to the MET department by Kirsten Hibbard, the Executive Director at the Bangor Challenger Learning Center. The scale model rover is intended to be integrated into their educational programs, with a functional drivetrain, wireless controller, and interactive elements to further engage students. Since receiving the project in September, the team has been researching the Mars Rovers that are currently in use, stepper and servo motors, control systems, power requirements and supplies, and 3D printing materials. Currently, designs are in the works for the drivetrain and initial programming has begun for a 1/8th scale prototype that will be used to test the control systems and functionality. The final replica will be visually a combination of the rovers Curiosity and Perseverance at a 1/5th scale. The team’s goal is to have a functional prototype with interactive elements completed on February 18th, 2021 to coincide with the landing of Perseverance on Mars. The prototype will be used by students on that date to gather feedback and improve the final product.
Weekly Updates
Week of 11/23
This week the team worked on finalizing the design of the initial prototype of the rover as well as the secondary prototype that will be tested on-site by students and campers. Our designs that included a full drivetrain were approved by the client and we began printing parts for the first prototype. Below is a photograph of the first part that was printed, a connecting arm that links the two sides of our rocker-bogie suspension. In addition to printing our first parts, we also worked on an electrical schematic of our rover including calculated voltages and amperages between our power source, Arduino, driver, and motors. The finalized and thoroughly checked version of the diagram will be completed within the next week.
Image 01: connecting arm

Week of 11/30
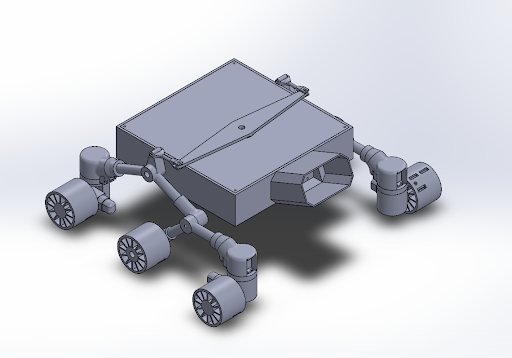
This week the team worked on finishing the electrical schematic of the rover including calculated voltages and amperages, and researched the code required for the arduino. We also printed the base of the rover which is our second part to date. The base will house all of the electronics as well as acting as a mounting point for the rocker-bogie suspension, battery port, and any features we include. A picture of the base during the printing process can be found below along with our current overall model of the rover.
Image 02: Printing the base
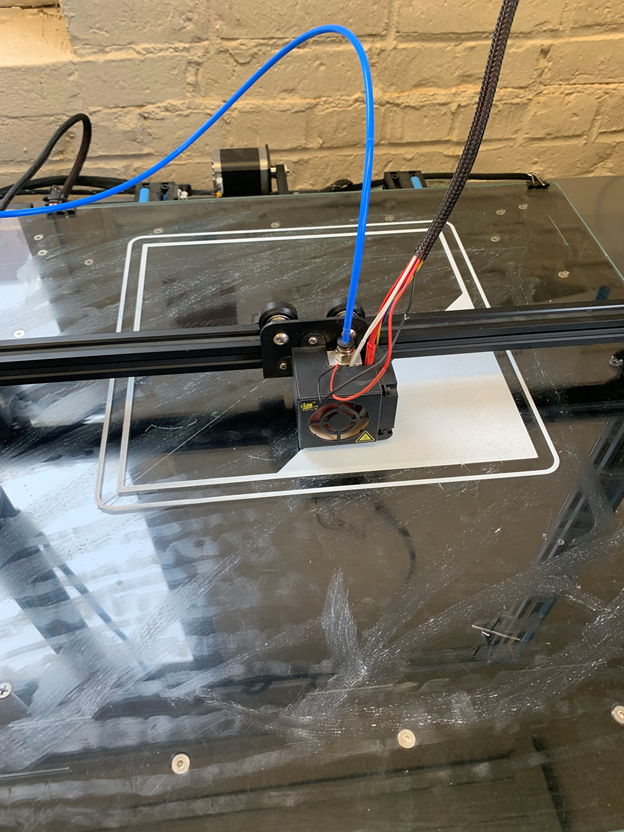
Image 03: Solidworks model to date
Week of 12/7
This week the team focused heavily on getting material ready for IR2 including lit reviews on transceivers such as Bluetooth and infrared, decision support matrices to support choices we have made, and updating sections of IR1. We also continued to print parts for the rover with the goal of having one side of the rocker-bogie suspension completed by Friday, 12/11. The next goal is to have the 1/8th scale rover printed in full by the end of the month which will allow us to move into working on the program and testing it before starting the 1/5th scale model. For the 1/8th scale rover, we will be using infrared to send inputs to the model as it is the most simple form of transceiver and will allow us to have a working prototype sooner, even with its drawbacks such as having to point the remote directly at the receiver on the model. We are currently researching other ways to connects the user interface to the rover that will be easier for the students at the CLC to use.
Spring 2021
Week of 2/5
Over winter break the team continued to print parts for the 1/8th scale rover, and began writing the code to control it. Thus far, cleanup of each individual part is complete. All excess material and rough edges have been removed, allowing for assembly to begin with the newly received fasteners. We are still planning on using an infrared system to communicate with the prototype 1/8th scale rover but are looking to Bluetooth as the most likely control system for the final 1/5th scale model. Over the coming weekend we will assemble our first rover, and refine the code that will drive it, with the goal of having the rover moving under its own power within the next week. We are on track to have a functional prototype at the Challenger Learning Center on the 18th of this month which will meet the goal that we had set at the beginning of our project in September of last year.
Month of February
After the first week of the month, the team quickly transitioned into a build and test phase with the goal of completing our prototype by the 18th. We were able to assemble the prototype by that date and get the electronics to work, but had to use the ELEGOO kit car that we had purchased for the motors because our own custom program was not functional at the time. Using the ELEGOO controller we were only able achieve tank style turning on the 18th as the controller would not move the servo motors to turn.
Testing on the 18th at the Bangor YMCA was successful overall with plenty of good comments/feedback, and constructive criticisms. For the testing students drove our rover forwards and backwards, another group drove the snap rovers brought by the Challenger Learning center, and one student was on a zoom call with us while they assembled one half of our Rocker-Bogie suspension. Overall the students preferred our rover to the ones brought by the Challenger Learning Center because ours was quieter, slower, and easier to control. The biggest positive to come out of the day was that the students highly enjoyed our I Pad controller, which we plan on carrying over to the final product. We also learned during testing that our current 5V DC motors will not have enough torque to move the rover as it struggled to start moving which we plan on addressing. We also found that our wheels were struggling to gain traction on the hardwood floors. Rubber wrist bands had to be used in order for the rover to gain enough traction to move instead of spinning its wheels. Below is a picture of the rover 2 days before our trip to the Bangor YMCA.
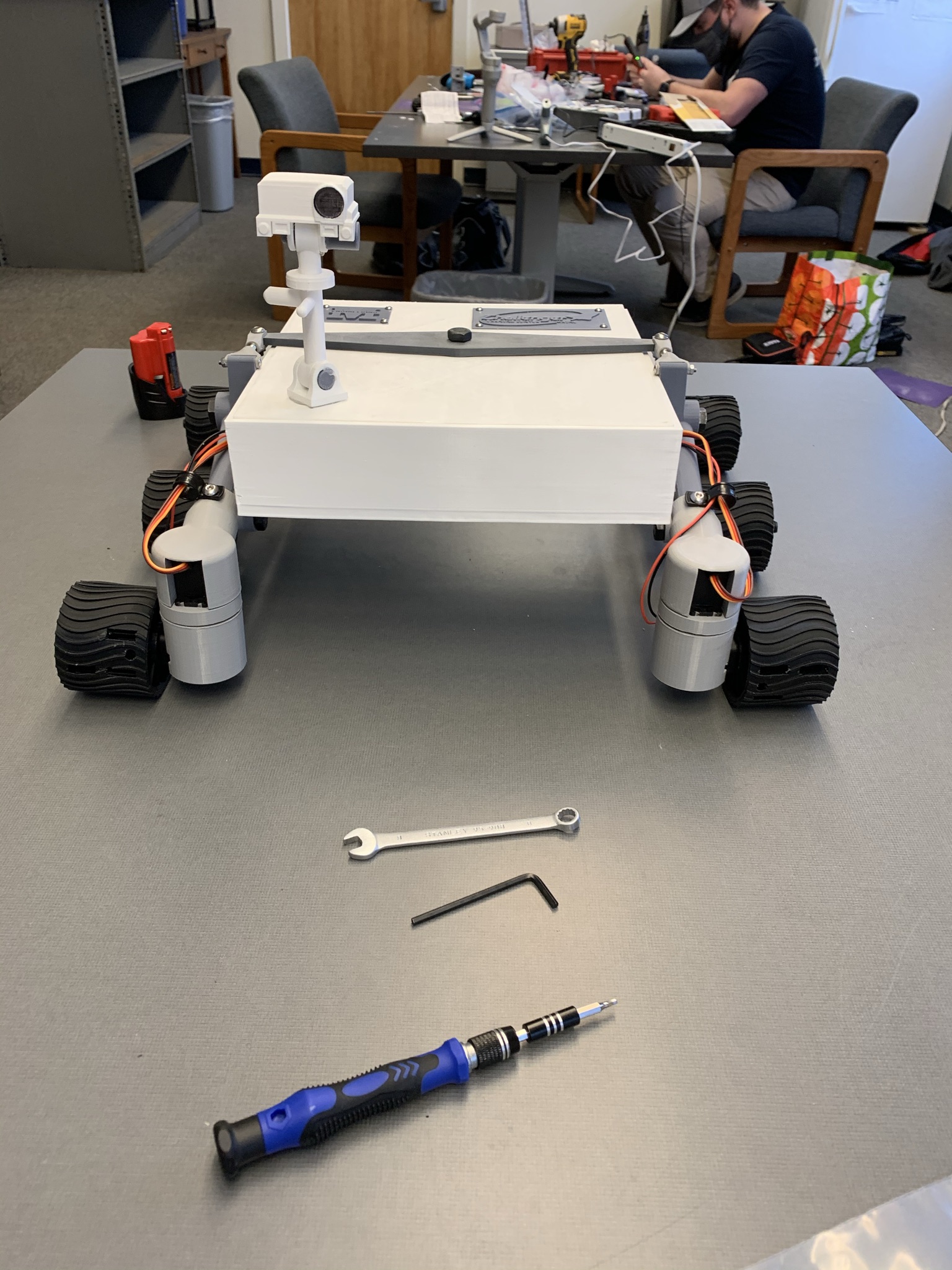
Image 04: Assembled rover before testing
Month of March
During March the team focused heavily on correcting the issues found during testing. Normal for testing was performed on the rover to determine on which wheel the coefficient of friction was greatest. We found that due to the design of our suspension the middle of the three wheels had the largest normal force and therefore the largest coefficient of friction, while the front wheels had the smallest normal force. To overcome the lack of friction we began to brainstorm ways of rubberizing the driven wheels as redesigning the suspension would be time consuming both in design and in printing. Several options were considered and eventually we decided to use the low cost method of applying Flex Seal to the wheels, giving them a rubberized coating. In completed friction tests, the 3D printed PLA parts that were sprayed with Flex Seal doubled their coefficient of friction which will work for our application. Lastly the team looked into and ordered a first person view camera to be housed in the mast. The camera will add another layer of immersiveness to the project and can add more ways for the Challenger Learning Center to use the rover. To overcome the torque requirements we initially looked into using rock crawler RC motors but found that even the slowest turning models (45t) would still be too quick for what the students are comfortable with. After conducting more research we decided to purchase 12 V geared motors controlled through and H bridge relay that would both give us the torque we needed, and the slow speed. We also redesigned the suspension to have square connections to prevent sagging and turning of the wheels when they were not meant to. Lastly, the team worked on researching and developing their own code to load into the Arduino. None of us have extensive knowledge or experience with programming which will make this aspect of the project one of the most difficult and time consuming.
Month of April
For the past month we focused on perfecting our adjustments, testing and re-writing the code, and finalizing the rover. The coding was eventually figured out and is now functional. We are able to connect to the rover through a customizable Bluetooth controller called Blynk, available on both IOS and Android which will allow the Challenger Learning Center to use multiple different types of devices to control the rover. The controller is set up as a joystick with up and down moving the rover forwards and backwards, while left and right turn the 4 servo motors at each corner. We spent the last week of the month preparing for our presentation on the 28th.
Week of 5/3
For the past week we worked on finalizing our design, and creating the final report. The rover is currently completed and we have a hand off time and date for tomorrow, 5/4/2021. Below is a isometric CAD image of our final design with the new 12 V geared motors, first person view camera in the mast, interchangeable tires for different terrains, and a cable management system to prevent a student from accidentally moving the wires.
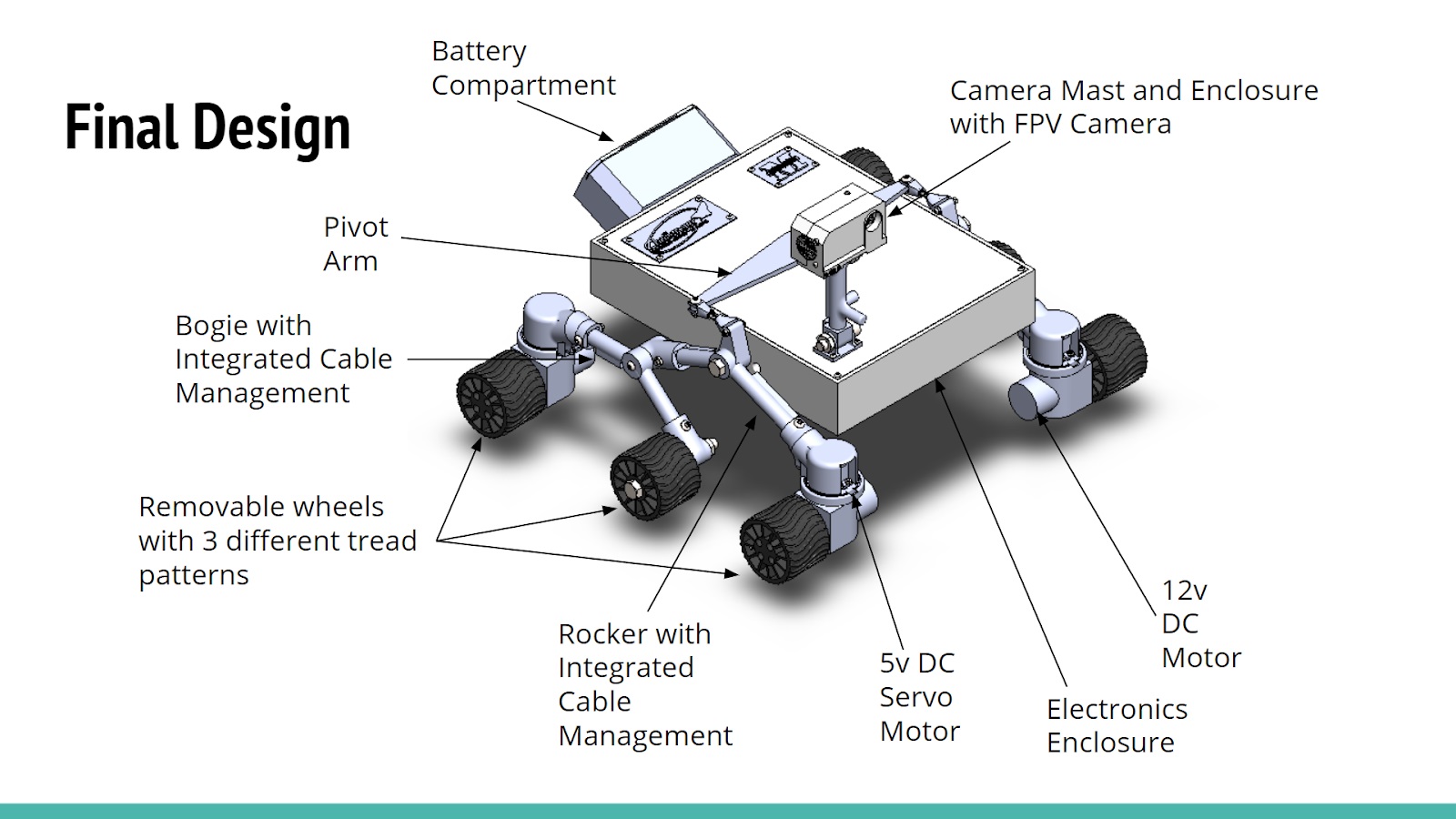
Image 05: Final design