Research Projects
Current Projects
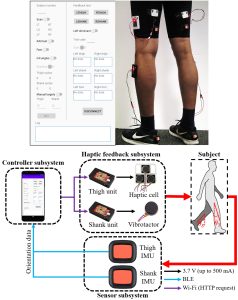
1. Optimal feedback algorithm for home-based gait training
Building upon our successful experience with creating a wearable haptic feedback system for home-based use, this project, founded by a grant from grant from NIH/NIA, investigates several key aspects of our system for enhancing motor learning and enabling real-world application of the system for walking exercise. We will test the hypothesis of whether perceptuomotor feedback will promote motor learning and improve key outcomes of stride length and speed in older adults with gait deficits. Older adults (65 < years < 95; normal neurological and cognitive status for age) who can walk independently, but do so slowly (gait speed < 1 m/s) will be recruited to use the feedback system while the acute and chronic effects of the system on gait parameters will be explored. This work will provide translatable research to address gait impairment using perceptuomotor feedback. Also, this training may ameliorate cognitive decline in older adults employing the attentional load caused by such feedback, which can be examined in the future. We will determine the optimal biomechanical tactile feedback algorithm to increase the thigh extension using two algorithms error feedback and positive reinforcement. We will also investigate the retention of gait improvements generated by the tactile feedback system through extended training sessions using a between-group design. The results of this research will address the key questions of whether the algorithm that evokes rapid improvements during theacquisition phase of a motor skill also fosters the learning of a skill, and if improvements during the training phase will be retained later when feedback is no longer present.
2. Interlimb neural coupling to enhance gait rehabilitation

Current gait training methods primarily focus on improving leg movements and overlook the role of arm movement, even though many people do not demonstrate appropriate arm swing. Walking is a complex skill requiring highly coordinated leg and arm movements. Arm swing then is an essential component of walking that impacts stability, balance, and energy efficiency. To improve walking, a whole-body approach should be adopted, one that takes advantage of how all fourlimbs work together in gait production. I have received my NSF CAREER Award to establish a novel framework for employing appropriate arm swing in gait training and creating more effective methods with enduring improvements for people with walking difficulties. In this project, we quantify normal arm swing while considering factors such as age and walking speed, and then create novel approaches using wearable robotic devices to induce normal arm swing during walking. This project seeks to fundamentally understand how to exploit inter-limb neural coupling and utilize arm swing to enhance gait rehabilitation. Different approaches for incorporating appropriate arm swing into gait training will be investigated to determine how interlimb coupling can be used to improve key parameters such as coordination, symmetry, variability, and walking speed. Two novel wearable robotic devices will be created as research tools to examine how tactile and kinesthetic force feedback methods can instigate and alter arm swing in users while walking at self-selected speeds. Participants in these studies include healthy young and older adults and individuals who have suffered a stroke and walk with difficulty but can walk without an assistive device.
3. Control of floating offshore wind turbine
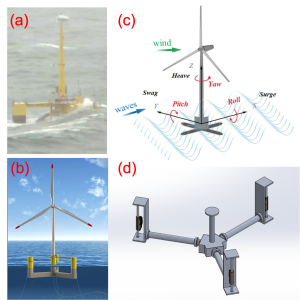 In this project funded by the Department of Energy (DOE), we are working on creating a novel control system for floating offshore wind turbines (FOWT). The coupled action of wind and wave on the stability of FOWTs tremendously affects the lifespan of these systems and their energy output. More specifically, wave-induced pitch/roll motions strongly affect energy capture and the lifetime (fatigue) of FOWT. Therefore, a novel active control system is required, which uses the prediction of an upcoming wave through a novel digital twin (DT) for the FOWT and, accordingly, tunes the damping ratio and natural frequency of the tuned mass damper located at the platform. The first aim of this research is to develop a DT model capable of diagnosing upcoming environmental events, forecasting what type of the system is affected by that environment, and actively minimizing wave/wind-induced responses at the frequency of interest accordingly. This is accomplished through a series of numerical investigations supported by observations in the physical model. The numerical models are carried out via the multi-physics and multi-fidelity code, OpenFAST, that enables coupled nonlinear aero-hydro-servo-elastic simulation in the time domain. So far, we have designed a Kalman filter as an observer based on linearized state-space models of the entire system’s nonlinear model. Using experimental verification, we have demonstrated our Kalman filter can predict the states with sufficient accuracy and, thereby, can be used as part of the controller design.
In this project funded by the Department of Energy (DOE), we are working on creating a novel control system for floating offshore wind turbines (FOWT). The coupled action of wind and wave on the stability of FOWTs tremendously affects the lifespan of these systems and their energy output. More specifically, wave-induced pitch/roll motions strongly affect energy capture and the lifetime (fatigue) of FOWT. Therefore, a novel active control system is required, which uses the prediction of an upcoming wave through a novel digital twin (DT) for the FOWT and, accordingly, tunes the damping ratio and natural frequency of the tuned mass damper located at the platform. The first aim of this research is to develop a DT model capable of diagnosing upcoming environmental events, forecasting what type of the system is affected by that environment, and actively minimizing wave/wind-induced responses at the frequency of interest accordingly. This is accomplished through a series of numerical investigations supported by observations in the physical model. The numerical models are carried out via the multi-physics and multi-fidelity code, OpenFAST, that enables coupled nonlinear aero-hydro-servo-elastic simulation in the time domain. So far, we have designed a Kalman filter as an observer based on linearized state-space models of the entire system’s nonlinear model. Using experimental verification, we have demonstrated our Kalman filter can predict the states with sufficient accuracy and, thereby, can be used as part of the controller design.
Past Projects
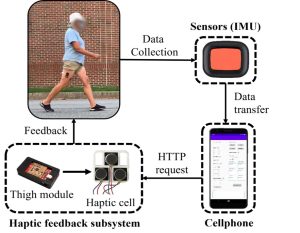
1. Biomechanical haptic feedback system for gait training of older adults
About 30% of community-dwelling older adults manifest gait abnormalities that, remaining untreated, will increase the risk of falls, loss of mobility, and other health issues. With aging, the loss of power generating capability of muscles, the presence of pain, and a decline in the cardiopulmonary system and joint structure can adversely affect an older adult’s gait. However, it has been reported that many older adults with age-related walking difficulties demonstrate sufficient muscle force production and joint range of motion for walking, thus, many of the early changes in gait seen with aging are often a reflection of impaired motor control. The motor control deficits are not ameliorated by the current interventions that target the musculoskeletal and cardiopulmonary systems. Instead, what is needed are motor learning interventions to generate more stable and efficient movement coordination for walking. There are two knowledge gaps in the literature on which my research has focused. There is a lack of (1) knowledge on the structure of such motor learning exercises, and (2) an intelligent robotic system that enables home-based, regular, and independent walking exercises for older adults. First, we created a first-of-its-kind haptic feedback system with several key features (modular, wearable (portable), wireless, and user-friendly) that enable home-based training. Second, we developed a biomechanics-1 driven method, in which tactile feedback is applied to users’ thighs to increase their peak thigh extension and, thereby, improve their stride length and walking speed. The results of our human subject studies have demonstrated that both young adults and older adults could significantly increase their walking speed (15.3%–19.4% increase from their baseline normal speed with no feedback) as they received feedback.
2. Wearable sensor for gait analysis
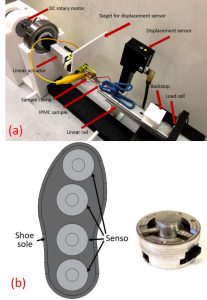
My research group has been working on developing wearable sensors that can be used for motion tracking and force measurements for robotic applications. In one research effort, we investigated multi-modal sensing capabilities of ionic polymer-metal composites (IPMC) for creating flexible sensors for measuring linear and torsional deformations as shown in the figure to the left. We demonstrated the unique sensing capabilities of IPMCs to create a distributed sensor over the entire body of the IPMC sample. We showed IPMCs could generate unique and distinct output voltage signals that were highly correlated with the type of motions induced. These results provide proof of concept for the future use of IPMCs as flexible and versatile sensors for measuring linear and rotational motions in applications such as wearable soft robotics. In another effort, we developed a novel capacitive-based three-axis force sensor for use in an instrumented shoe for directly measuring all the components of three-dimensional (3D) ground reaction forces (GRFs) during walking. Current systems that measure 3D GRFs include instrumented treadmills and force plates, both of which can only be used in a laboratory setting and not in real-world scenarios. Additionally, instrumented treadmills are highly costly, and walking on a treadmill differs from natural overground walking. The force plates embedded in a lab’s floor only can capture a few steps restricting the amount of data and monitoring realistic situations. Our novel sensor is low-cost and easy to fabricate with high accuracy, which promotes its accessibility and usability for gait analysis in clinical and research settings. We achieved the static and dynamic errors along the three axes were less than 2.28%, which is well within the acceptable range for the intended application.
3. Assistive Devices
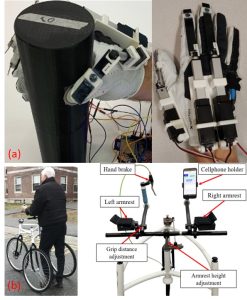
Activities of daily living (ADL) and mobility are critical for everyday life,for which many individuals including older adults need assistance. To address these issues, we have worked on two projects. Millions of people suffer from a decline in grip strength and hand function due to conditions such as chronic disease, injuries, and aging. Hand function decline results in difficulties with performing ADL, where grasping, lifting, and releasing objects are essential. In one project, we developed a new bidirectional lightweight assistive glove for helping with grasping tasks during ADL, and demonstrated its capabilities through comprehensive experiments using human subjects. The developed glove can provide adequate power augmentation for grasping and releasing objects due to its simple yet effective design using spring steel strips and linear actuators. The glove directly transfers assistive forces to users’ fingertips without any complex intermediate mechanism, and its low weight of 196g promotes its usability. The glove can generate the necessary grasping forces to assist with lifting common household objects, and users’ muscle activity significantly decreases when using the glove for object manipulation. Our study has shown the glove’s ability for grip power augmentation is suitable for individuals with declining hand strength. In another project, we focused on developing the AfariTM mobility device and the integrated IntracTM activity tracking system. The Afari is a three-wheeled device that assists users of any age with mobility impairments with outdoor exercise and movement in various environments and surfaces. We demonstrated the structural strength and stability of the Afari under cyclic fatigue tests and on steep slopes, respectively, which both are beyond the capabilities of current commercial rollators. We created a smartphone-based sensing system, the Intrac, which was designed for and integrated with the Afari to monitor the user’s interaction forces and important gait parameters. Intrac offers a graphical user interface for displaying and sharing measurements with users and providers, and the accuracy of its measurements was validated by testing its components. The users can utilize the Afari for various levels of weight compensation during walking, while the Intrac enables real-time monitoring of interactive forces on their arms and key gait parameters.